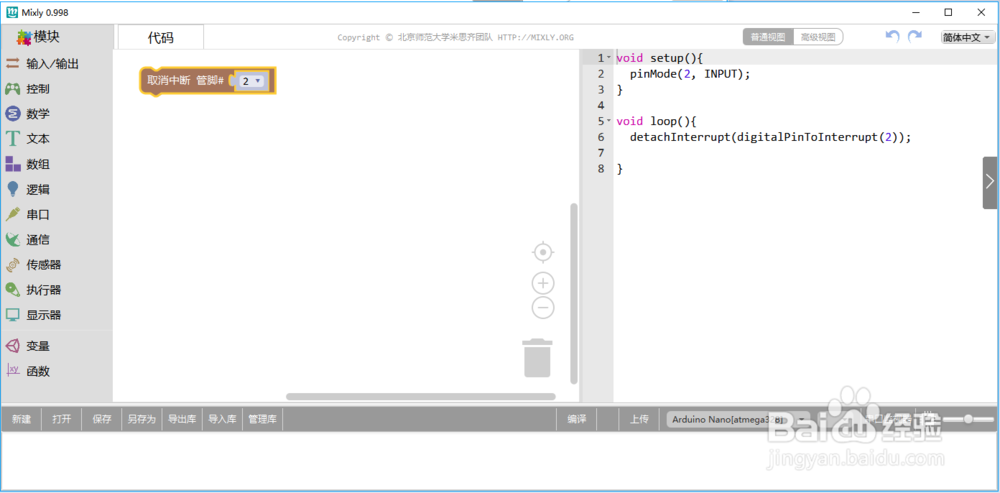
1、取消中断模块,取消某引脚中断
2、管脚模式,设为输入
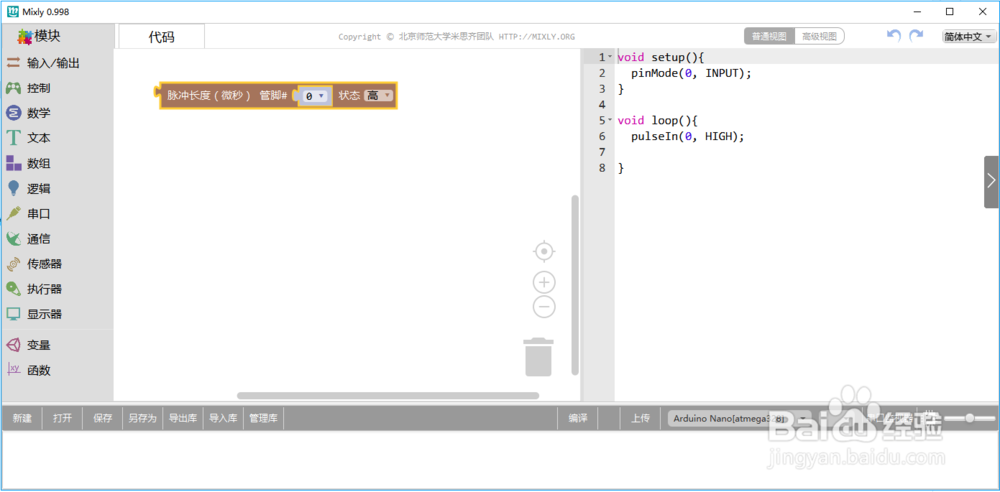
3、脉冲长度模块,获取相应引脚持续一种状态的时间长度
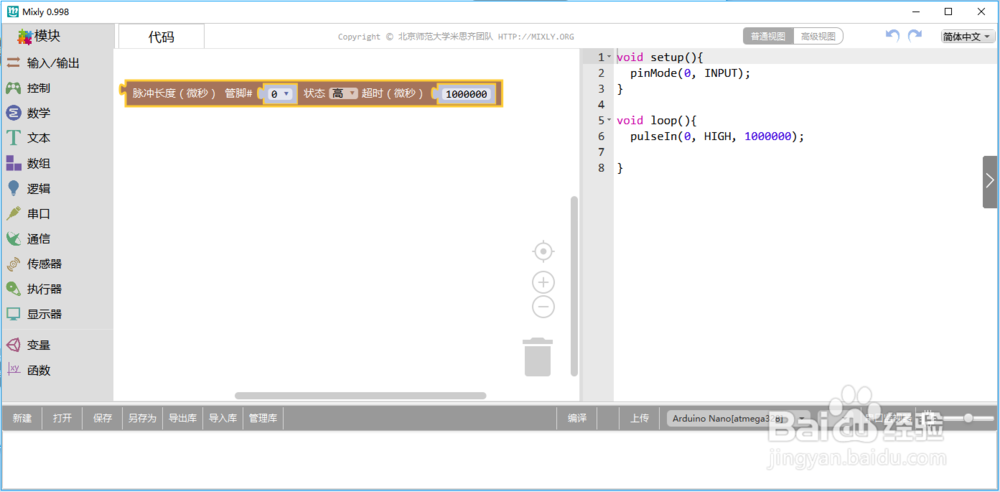
4、带超时限制的脉冲长度模块,超时参数
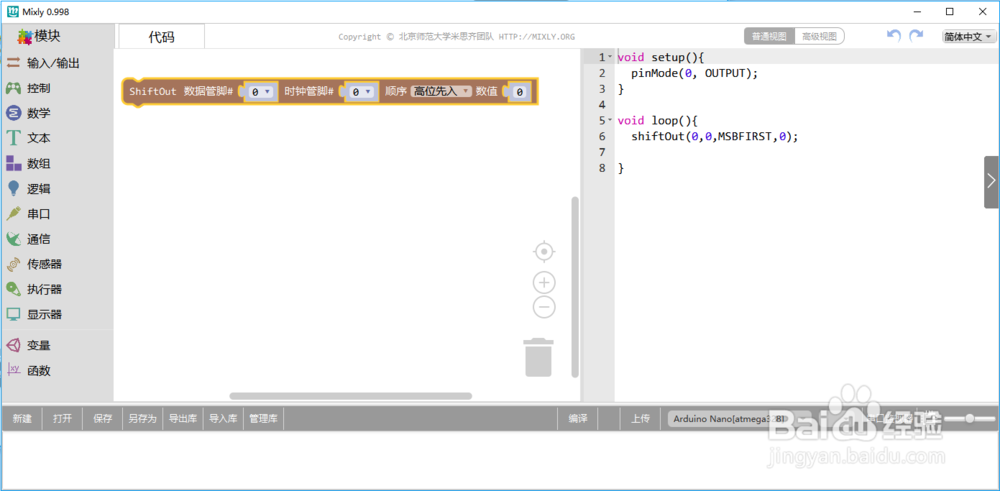
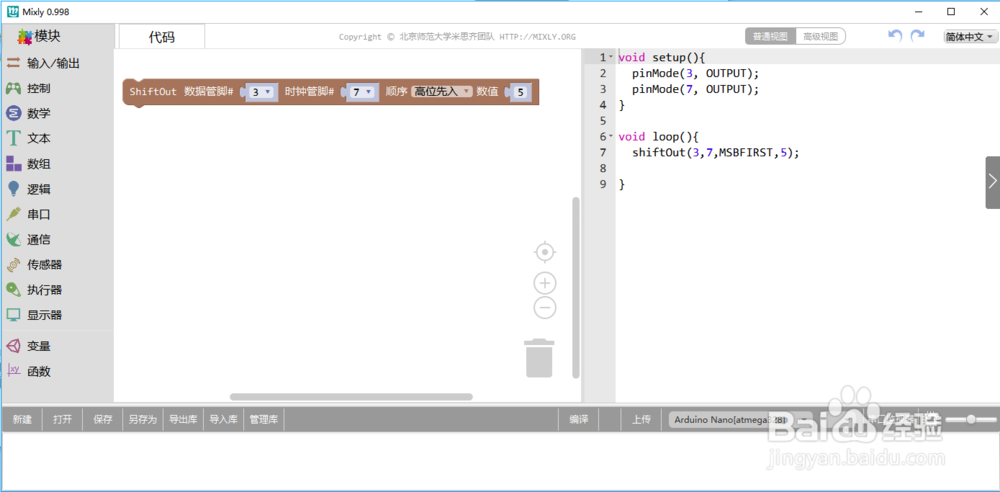
5、移位输出模块
6、移位输出模块,一个数据引脚,一个时钟引脚,以数字脉冲形式发送最后的数据参数